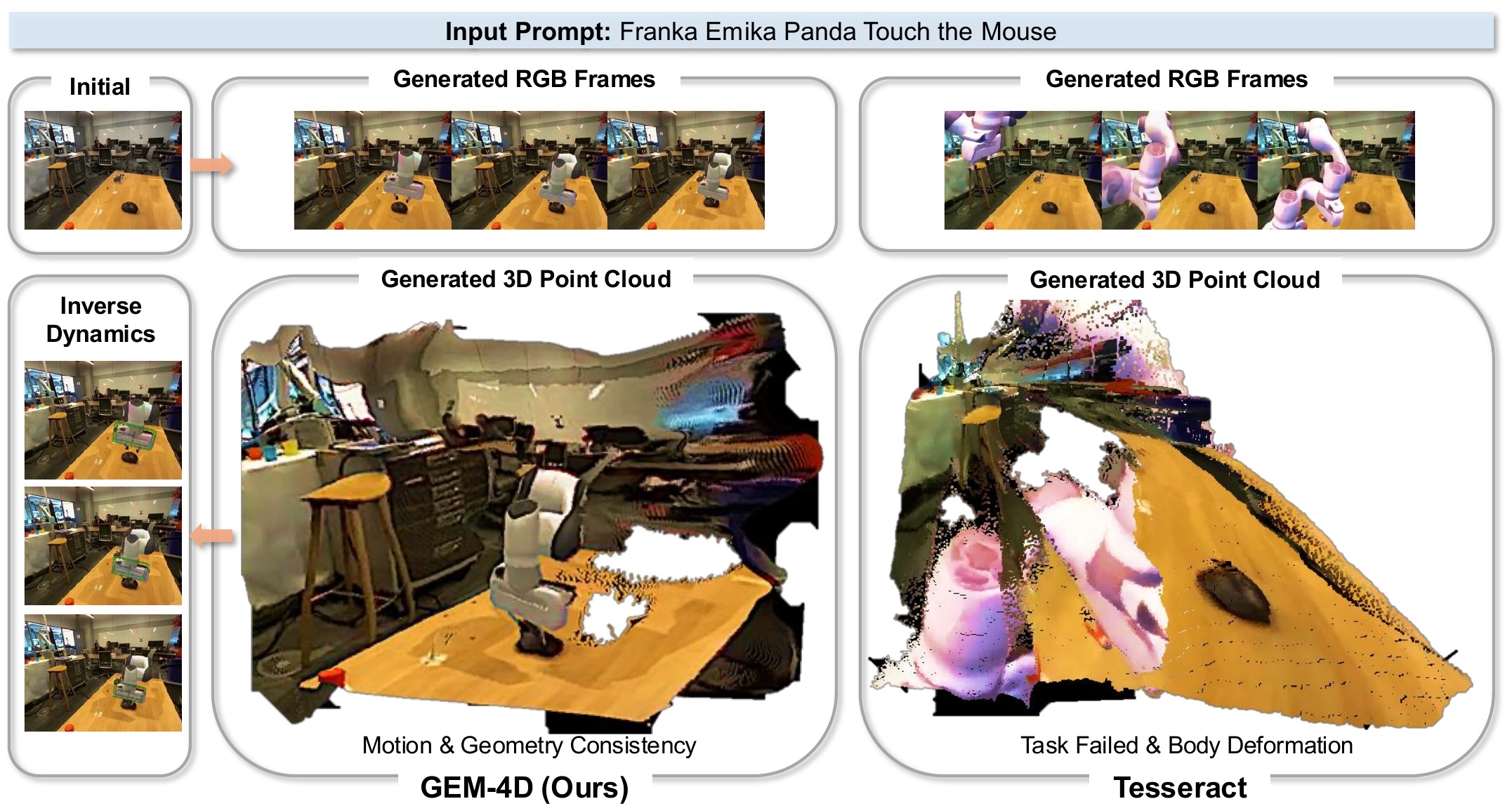
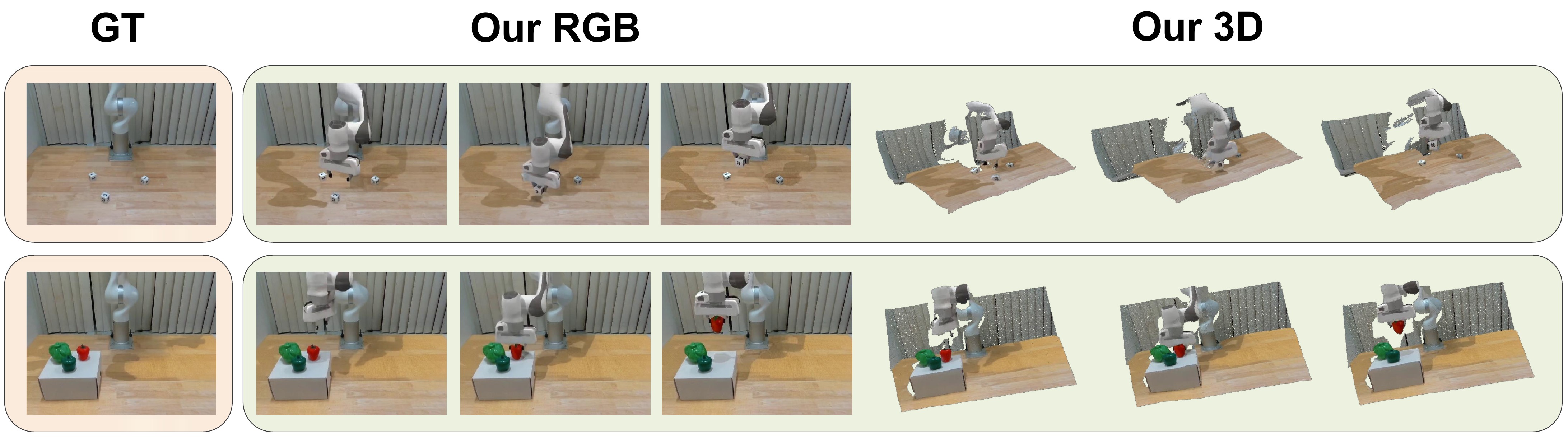
Video world models can generate realistic futures from a single instruction, but they often fail to preserve consistent point-level motion over time. As a result, the generated videos appear plausible, yet lack the physical grounding required for reliable action execution, such as robot manipulation. We present GEM-4D, a geometry-grounded video world model that resolves this limitation by injecting dense 4D correspondence supervision distilled from a pretrained geometry foundation model into the video generative backbone during training. This supervision enables the model to jointly capture appearance and geometric structure while retaining a single-stream architecture with no additional inference cost. We further introduce an inverse dynamics module that converts correspondence-consistent video rollouts into executable robot trajectories, enabling direct deployment in both real-world and simulated manipulation. GEM-4D achieves state-of-the-art performance on both video prediction and geometric consistency across both simulation and realistic scenarios, and improves real-world manipulation success from 61% to 81%.